【ドローンの基礎】ジャイロセンサーの仕組みとは?なぜ必要?
こんばんは!クアッド・スターズのリョウタです。
ドローンに搭載されているジャイロセンサーの仕組みとは?
そもそも、なぜジャイロセンサーが必要なの?
このような疑問について解説をしていきます。
ジャイロセンサーとは簡単に言うと、、、
ドローンがひっくり返らないように、機体の姿勢(水平)を保つ機能の1つであり、重要な役割を担ってます。
ジャイロセンサーの仕組みとはどのようになっているのでしょうか?
そもそも、なぜ必要なのでしょうか?
それでは、見ていきましょう(^^)
ジャイロはなぜ必要なのか?【重要な役割】

ドローンは空中を飛ぶ飛行体であるため、常に不安定な状況に置かれています。
ジャイロセンサーの搭載は必須機能の1つであり、これが無ければ空中を浮かぶドローンはその姿勢を維持できません。
安定した飛行ができず、カンタンにひっくり返ってしまうということですね。
ジャイロセンサーの役割とは?
つまり、
「機体がどれくらい傾いたか?」
とか、
「機体が傾いてしまう速度はどれくらい?」
などなどを知るために必要です。
ドローンにとってジャイロセンサーは、無くてはならない超重要な機能であり絶対に不可欠です。
MEMSジャイロセンサーの仕組み
ドローンの姿勢(水平)を保つために、ジャイロセンサーは重要な役割を担っています。
はたして、
ジャイロセンサーはどのように、ドローンの水平位置を割り出しているのでしょうか?
ジャイロセンサー単体では水平の状態かどうかは検知できません。
(ドローンの初期位置を割り出すのが必要がある)
そこで、
ドローンと一緒に搭載されている、重力方向の検知が可能な加速度センサーの出番です。
最初に加速度センサーで重力方向を検知し、その方向(重力方向)を鉛直方向として水平(初期位置)を割り出しているということです。
水平面の角度(初期位置)は飛行中にズレが生じるため、静止状態であるホバリングをしているときを利用して、加速度センサーからのデータを取得し姿勢制御の補正をしています。
なぜ、静止しているホバリング状態で姿勢の補正をするのか?
それは加速度センサーの仕組みが影響しています。
加速度センサーは重力と遠心力の区別ができません。
したがって、遠心力などの影響が働いていない静止しているホバリング状態を選んで補正をしています。
【姿勢センサーユニット(MEMSジャイロセンサー×加速度センサー)】

ジャイロセンサー【3つの種類】
現時点でジャイロセンサーは3つの種類が存在します。
主に『振動式』『機械式』『光ファイバー式』この3種類。
ジャイロセンサーはMEMS技術により、超小型化と低コストを実現した振動式ジャイロが開発されました。
近年では多くのドローンに搭載されています。
市販されているドローンの多くは、振動式ジャイロの採用が一般的となりました。
機械式ジャイロセンサー
機械式ジャイロセンサーとは、回転しているコマが姿勢を変えない性質を利用しています。
機械式ジャイロの歴史かなり古く、その原型は今から約296年前の1724年頃には発明され、この世に存在していました。
飛行機が発明されてから、わずか11年後の1914年にアメリカのローレンス・スペンリー(1892年~1923年)によりジャイロを使った飛行機操作の自動化が実現しています。

【1940年にVS-300で初の自由飛行に成功】
振動式ジャイロセンサー
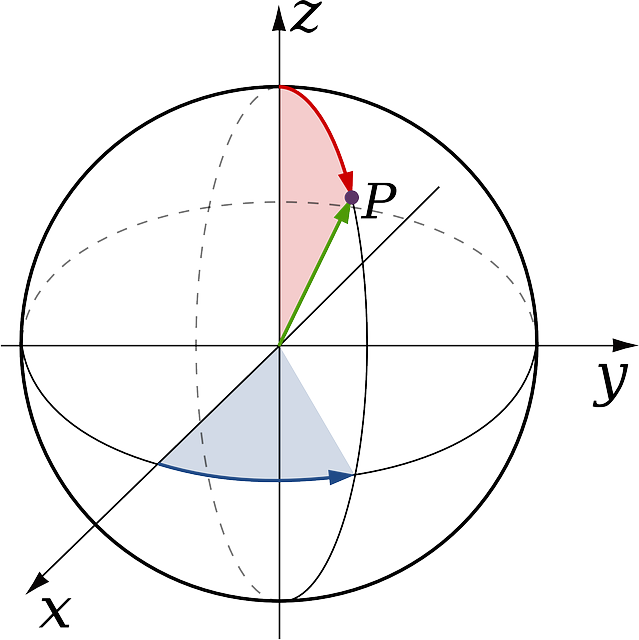
振動式ジャイロセンサー(角速度センサー)とは、角速度の測定が可能なセンサーの一種です。
(いわゆる慣性センサーの仲間)
角速度センサーとは?
角速度センサーとは検出アームの角度が時間単位で、どれくらい変化したのかを検知します。
つまり検出アームが回転している速度を表す物理量です。
振動式ジャイロセンサーの仕組みはどのようになっているのでしょうか?
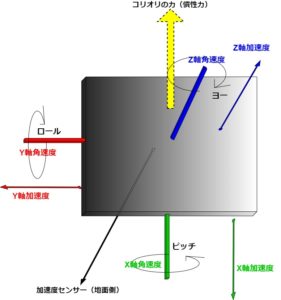
振動式ジャイロセンサーの仕組みとは、駆動アームが動作して検出アームが回転(検出運動)することで検出アームの振動運動量が振動によって非対称に変化します。
よって、その変化分の運動量を検知します。
動きを検知する慣性センサーと言えば加速度センサーが代表的ですね。
(しかし加速度センサーは回転の動きは検知できない)
振動式ジャイロセンサーであれば、加速度センサーでは検知できない回転の動きを検知し測定可能です。
振動式ジャイロの歴史は、半導体製造の半導体製造(シリコンプロセス)が確立してくる1985年以降、シリコン基板上にリソグラフィーやエッチングなどシリコンプロセスを用いて機械的製造を構築できるMEMS(Micro Electro Mechanival Systems)技術により、超小型かつ低コスト化の実現に成功しました。
それ以降から現在に至るまで、スマホ・デジカメ・カーナビなど、多くの製品に内蔵され幅広く普及してきました。
現在のドローンで採用されているジャイロの多くは、この振動式ジャイロセンサーが一般的で主流です。
光ファイバー式ジャイロセンサー

光ファイバー式ジャイロセンサーとは、巻いた光ファイバーの両端からレーザー光を入れ、右回りの光と左回りの光が中央で干渉する(ぶつかる)状態を利用して、サニャック効果の原理に基づいて検出します。
サニャック効果とは光路の運動(光速)により光路の長さ(時間)が変わったかのように見える現象です。
地球の自転や公転までわかるほど高い精度を得られます。
しかし、光ファイバー式ジャイロは超長く巻いた光ファイバーが必須です。
ゆえに小型化は難しい・・・
しかも高価!
一般的にはお目に掛かることは無く、大型のドローンや潜水艦などに利用されています。
ジャイロの歴史は意外と古い
上記の機械式ジャイロの項でも触れたローレンス・スペンリー(米)はオートパイロット装置の先駆者です。
この時代から『飛行機操作の自動化』という概念が存在していました。
この時に使用された飛行機は1903年にライト兄弟によって発明された『固定翼機』です。
回転翼機において操縦技術が確立されたのは、その後の30年ほど経過した1940年とのこと。
1939年9月14日、アメリカのコネチカット州でテールローター式の基礎となったシングルローターのヘリコプター『VS-300』をロープで繋いだ状態で飛行させ、その翌年1940年5月13日に『ヴォート=シコルスキーVS‐300』の自由飛行を成功させました。
今日のまとめ
いかがでしたか?
今回はジャイロセンサーの仕組みと、なぜ必要なのか?について解説をしました。
ジャイロセンサーが無ければ安定した姿勢を維持できません。
よって、空中を飛ぶドローンにはジャイロセンサーは必須です。
ジャイロの歴史も意外と古い!
機械式ジャイロの技術に関しては、1724年頃にはすでにこの世に存在していました。
MEMS技術により超小型化と低コストが実現でき、現在では多くの製品に振動式ジャイロセンサーが内蔵され幅広く普及しています。
ジャイロセンサーは何気なく使用している、身近な製品にも使われていたのでした。
今日はここまで!
では(^^)
